|
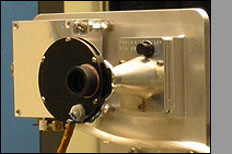
The cameras used for Rover
navigation are small CCD (Charged Couple Device)
Cameras similar to Web Cams.
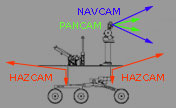
With out cameras the Rover is blind. Rovers
typically have more than one camera which they
can use to
navigate with.
SOJOURNER: 3 Cameras
2 forward B&W (Navcam)
1 rear 3 Colour (RGB)
MER: 9 Cameras
2 Forward B&W (Hazcam)
2 Rear B&W (Hazcam)
2 Mast B&W (Navcam)
2 Mast Colour (blue to IR)
1 Arm mounted B&W
|



 A
rovers on board computer (CPU) is no more powerful
than a high end, powerful laptop computer. However
it does contains special memory (RAM) which is
tolerant
of extreme radiation, and safeguards against power-off
cycles. Memory is persistent which enables the
Rover
to shut down at night without loosing or erasing
data.
A
rovers on board computer (CPU) is no more powerful
than a high end, powerful laptop computer. However
it does contains special memory (RAM) which is
tolerant
of extreme radiation, and safeguards against power-off
cycles. Memory is persistent which enables the
Rover
to shut down at night without loosing or erasing
data.