|
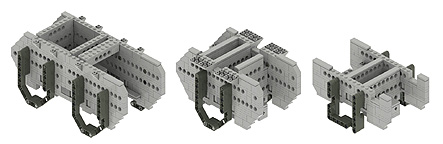
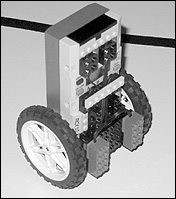
The most famous 2 Wheeled LEGO Robot was made by Steve
Hassenplug which he affectionately called Legway
(named so after its real world counterpart the Segway).
Steve says “this LEGO robot was built to stand
on two wheels and balance, follow a black line, and/or
spin in place. I managed to find the correct combination
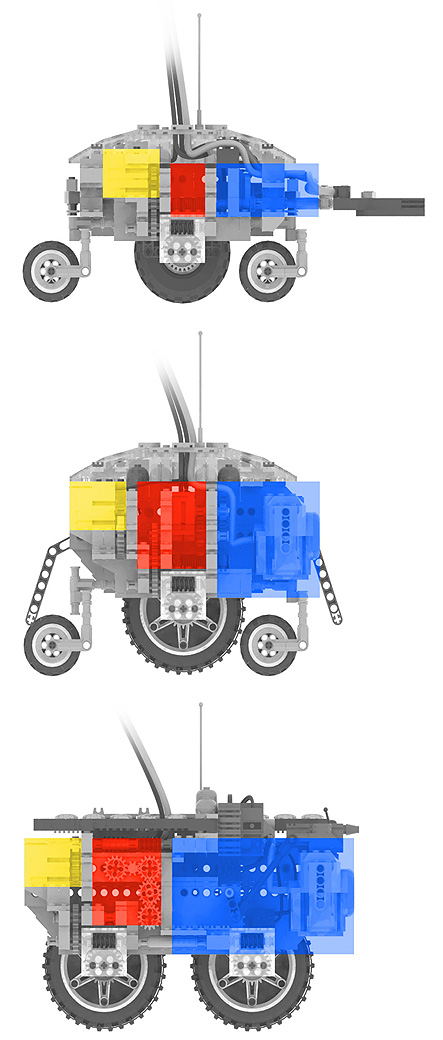
of hardware and software to allow the robot to balance.
LegWay constantly attempts to adjust its balance
point. I've been able to put it on a table, and tilt
the table, and LegWay continues to maintain its balance.
Learn more about Legway here,
and the Building
Instructions here.
Background information on the original Segway can be
found here.
|