 Drive
Actuators Drive
Actuators
As
we learnt earlier the M.O.P Chassis is divided into three zones.
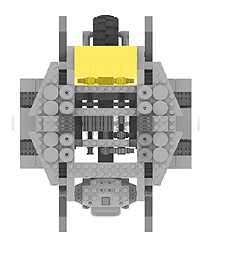
The Drive Actuators (motors) are located in the Yellow Zone (Motor
Bay). They provide drive to the wheels via a drive assembly (Located
in the Red Zone)
While this may not seem the most efficient way to power the wheels
(See YogiCub for an alternative method) it does allow us to modify
each part of the Mobility system independently without having to
re-design the whole rover.
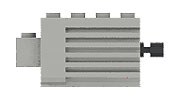
The most common drive motors used in mobile LEGO Rovers (and many
other applications) are the 9V
Technic Mini-Motor.
These little beauties have internal gearing and are very efficent
when powered from the RCX – They are an ideal choice for
an all round drive motor. However there are many other types of
LEGO motor available, and luckly for us, the Motor bay allows for
different motor fixing methods.
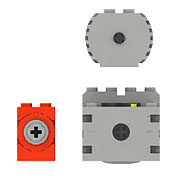
The older LEGO 9V
Technic motor,or the newer transparent
Geared Motor,
would be the most obvious alternatives, each having specific
perfmance characteristics however it is not
inconceivable to mount a RC Race
Buggy motor into the chassis (as
long as it had a tethered power supply).
Check out Philippe Hurbain’s massive motor
comparison to
see what each motor has going for it.
|